Projects
PTG Scroller

PTG Scroller is an Terminal User Interface (TUI) e-reader library for reading .scrl (“Scroll”) files using Balázs Cene’s Python TUI framework PyTermGUI.
Titan Rover
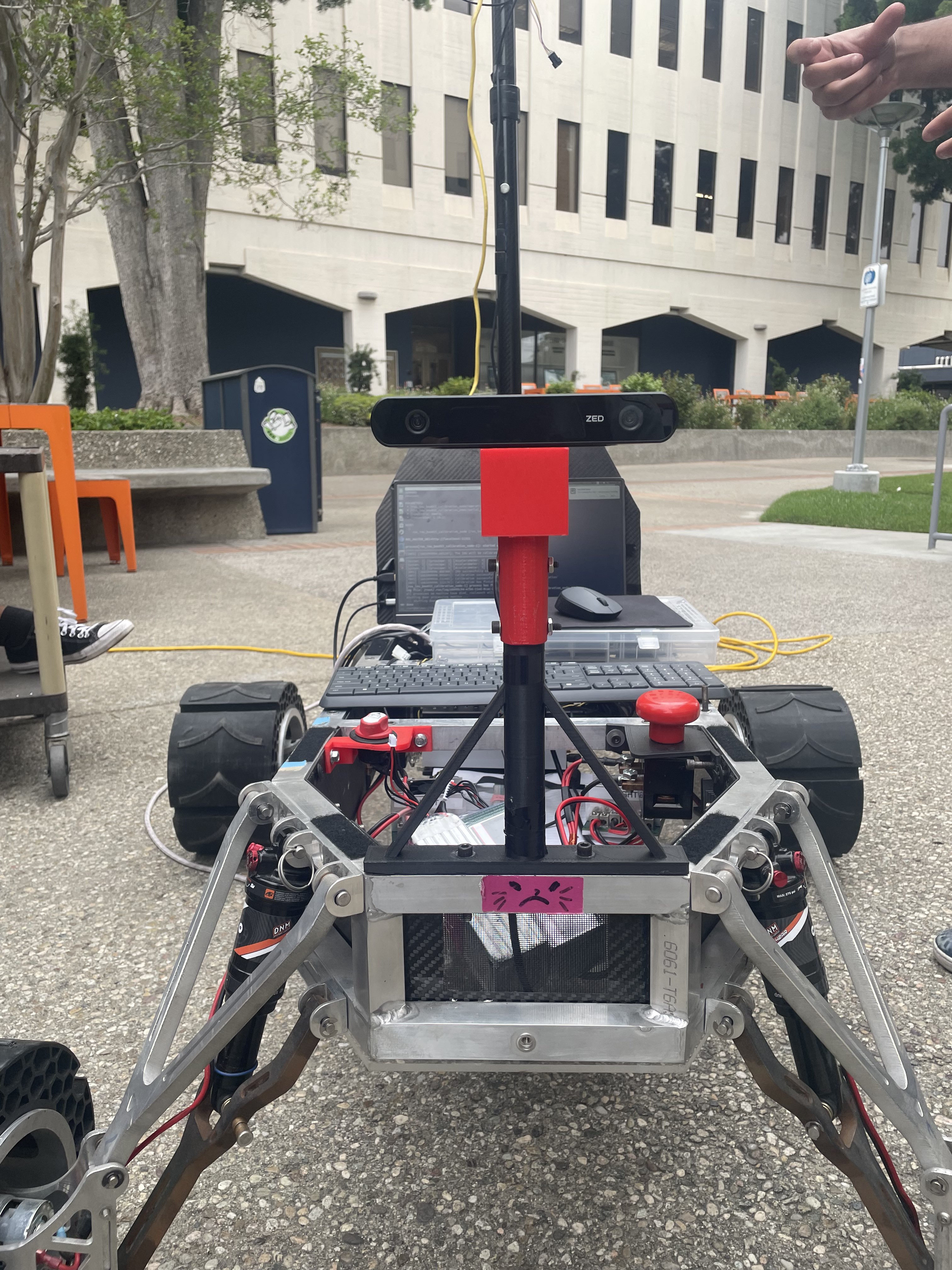

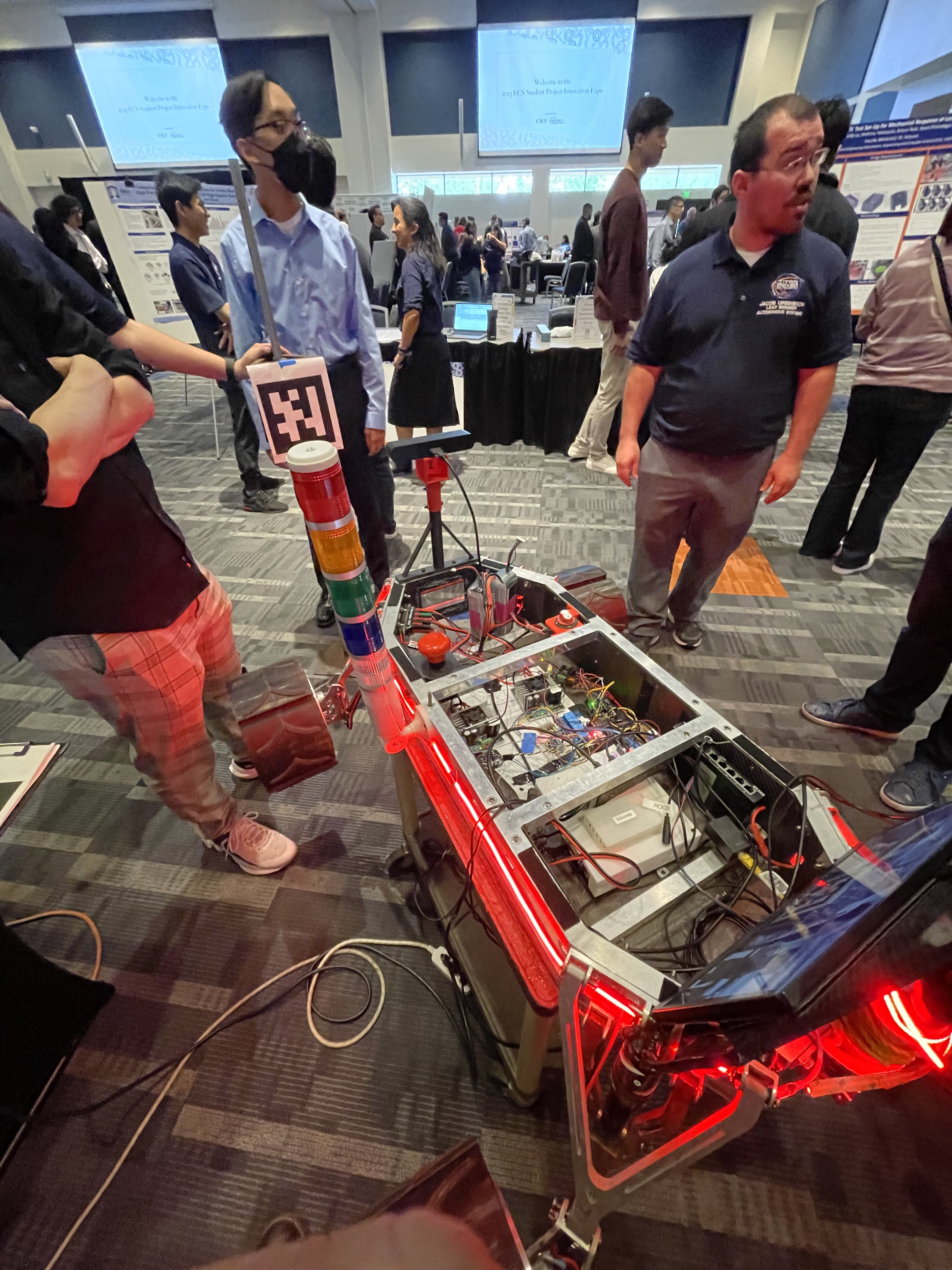
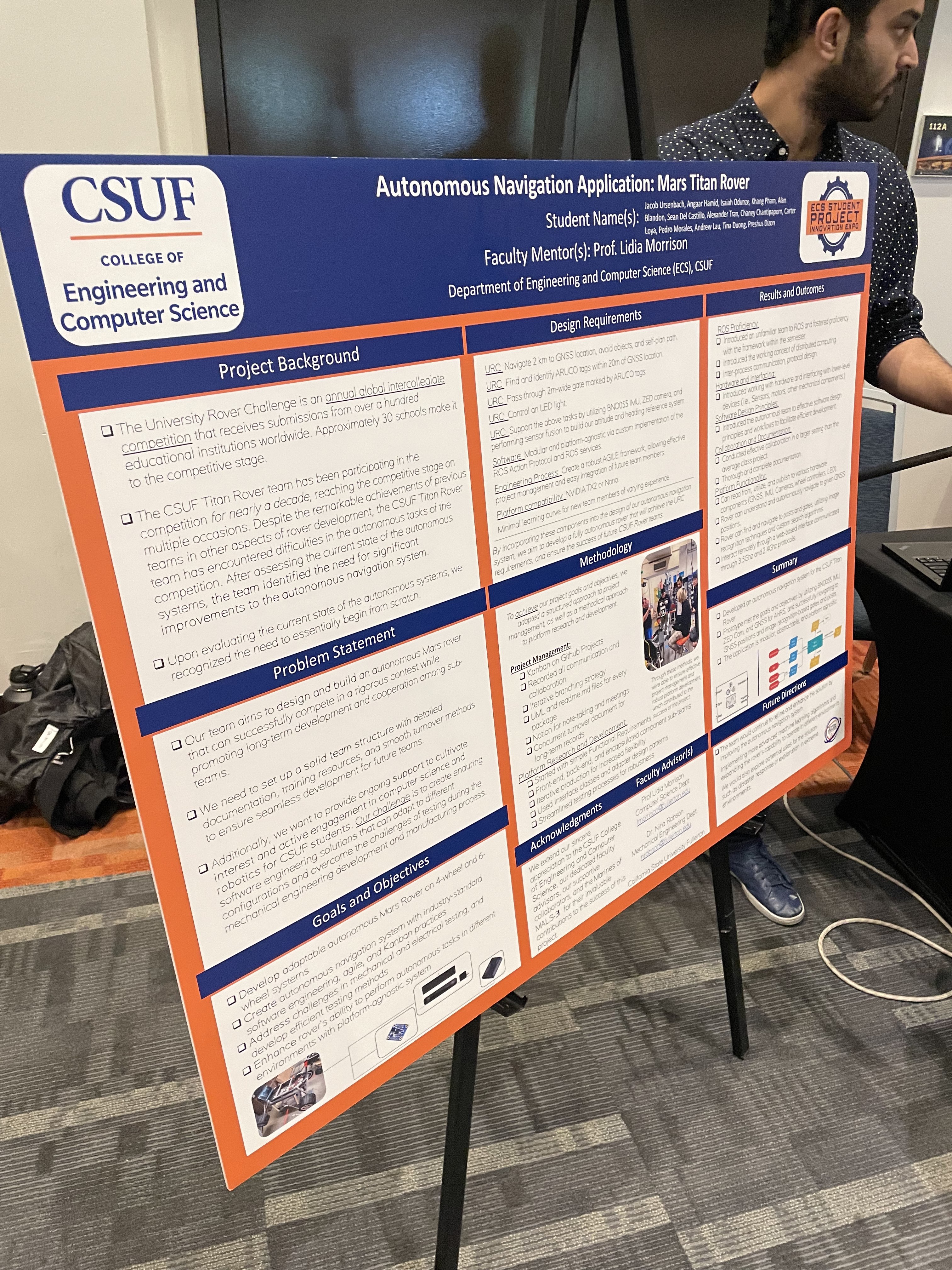

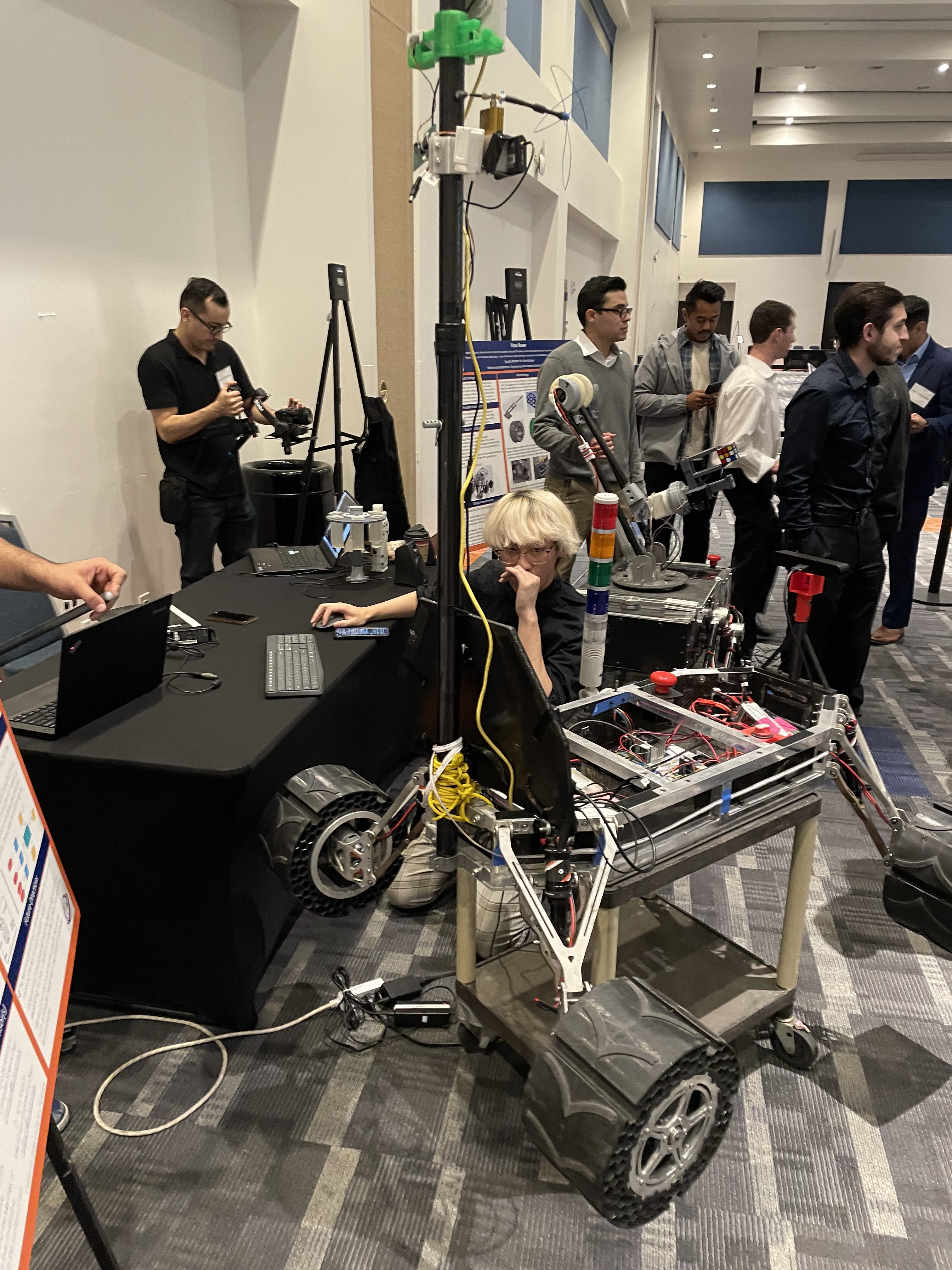
The Titan Rover is California State University, Fullerton's submission to the Mars Society's University Rover Challenge (URC). The Titan Rover is a remotely operated rover platform fit to accomplish tasks to assist astronauts in difficult Martian terrain.
The Autonomous section was formed to complete the Autonomous Navigation Mission (URC2023 1e) with the following requirements:
- Rover must be able to autonomously navigate in up to moderate terrain to locations marked by Global Navigation Satellite Systems (GNSS) coordinates or by Aruco fiducial markers in two configurations:
- Single post
- Two posts placed two meters apart to form a gate
- A navigation mission consists of three single posts and a gate. The Rover is given GNSS coordinates in proximity of these markers and must be able to search the vicinity to find the fiducial markers and navigate to them. A marker is reached when:
- For single posts: rover stops within two meters
- For a gate: rover fully passes between both posts
- The Rover must be able to detect when a marker is reached.